”单目相机 标定 改进的张氏方“ 的搜索结果
改进的张氏单目相机标定方法。自带二维标定板,可运行,有数据、有文档讲解
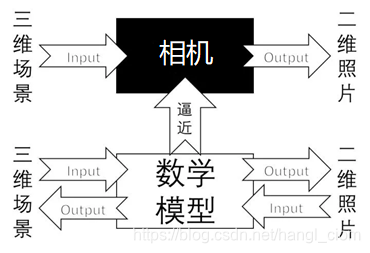
1 机器视觉为什么要做相机标定 机器视觉是采用相机成像来实现对三维场景的测量、定位、重建等过程。是一个利用二维图像进行三维反推的过程,我们所处的世界是三维的,而图像或者照片是二维的,可以把相机认为是一个...
第一章 引言 1.1 研究背景 同时定位和建图(SLAM)是机器人和自主导航中的一个重要领域。它是指机器人在未知环境中移动并使用其传感器和里程计信息构建环境地图并同时估计其在此地图中位置的过程。...

摄像机标定从标定板类型可以分为:一维标定物,二维标定物和三维标定物(哈哈) 一维标定物标定算法是利用摄像机投影过程中的交比不变性的原理,常用来标定摄像机阵列(多个摄像机)。具体原理可参考:基于一维标定...

项目实战——基于计算机视觉的物体位姿定位及机械臂抓取(单目标定) 请各位读者朋友注意,这里面很多东西涉及到我的毕设,写作辛苦,请勿滥用,转载请务必注明...

SLAM-Based Self-Calibration of... 基于SLAM的三维场景点图构建3.1 单目视觉SLAM系统3.2 单目相机姿态跟踪3.3 构建3D点云地图4.外参校准4.1 匹配特征点4.2 初始外参估计4.3 联合优化4.4 验证校准结果5.实验5.1 实验...

一、基础学习课程 深度学习 计算机视觉 二、论文学习 ...1、室内动态视觉SLAM算法研究硕士学位论文 ...鲁棒性:鲁棒是Robust的音译,也就是健壮和强壮的意思。... 比如说,计算机软件在输入错误、磁盘故障、网络过载或...

立体匹配:为左图像的每个像素点(xl, yl),在右图像中搜索对应点匹配基元:参与立体匹配,计算相似测度的基本单元常用的匹配基元:像素单个像素存在相似性歧义需结合一行或整幅图像的所有像素同时完成匹配局部窗口...

基于ROS机器人的3D物体识别与三维重建(一) 介绍篇 由来:清理电脑硬盘,发现了当时做毕设的一些资料,所以打算整理一下资料和代码写成专栏,记录下当时的暗金岁月,尽管现在实验室的做的项目已经不是这个方向了。...
大家好,我是小凡,「3D视觉从入门到精通」知识星球的星主。这两天,有粉丝私信我,他开心的表示,自己在工坊学习了星球里的结构光课程和小鹅通里曹博主讲的结构光课程,基于工坊的双目结构光硬件和代码,搭建了一套...